官方微信
官方微信

 官方QQ
官方QQ


一、期刊发表采摘机器人动作测试
在水果的收获季节,由于大量果实待采摘,加上农村期刊发表劳动力的进一步减少,果实的采摘难度较大,若不及时采摘而腐烂变质会给果树种植管理人员带来较大的损失。随着农业期刊发表现代化技术的不断发展,采摘机器人开始被应用到果蔬的采摘上,从而极大地提高了果实的采摘效率,降低了劳动强度,提高了果农收入。在采摘机器人自主化作业过程中,机器人通过传感器采集到待采摘果实的图像,再采用图像处理的方法在机器人采集到果实作物信息后快速地锁定目标,利用控制系统执行采摘动作。因此,图像处理和最后执行动作的效率和精度对果实的采摘效果影响较大。执行动作的优化可以提高果实的采摘效率和精度,而通过机器学习和仿真模拟训练数据的分析可以实现采摘动作的优化。
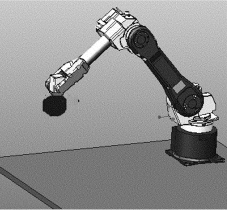
为了简化仿真模拟过程,以苹果的采摘环境作为研究对象,取采摘机器人动作的关键部位机械手为重点分析部位,创建了采摘机械手的三维模型。仿真时,按照苹果的尺寸和位置,通过机器学习和图像处理对果实进行定位,并利用动作数据库选取最佳的采摘动作,最后通过对数据的统计和分析得到采摘效果的分析数据。采摘动作仿真分析如图1所示。
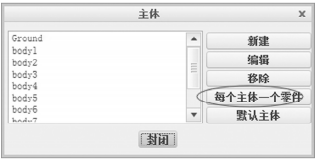
仿真模拟数据分析时可以选取不同的模块数据输出,每个模块数据的分析可以为动作数据的优化提供数据支持,如图2所示。通过仿真模拟主要得到了动作的准确性程度,结果如图3所示。
采用神经网络训练的方法对采摘动作的精度进行了模拟测试,结果如图3所示。
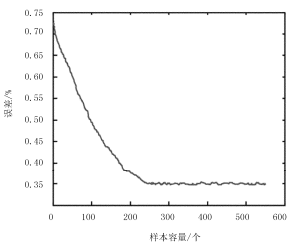
由图3可知:随着样本容量的增加,误差由大变小,是由于神经网络训练样本数越多,越容易选出合适的执行动作,从而提高动作精度。
二、期刊发表结论
为了验证动作的训练效果,基于期刊发表多媒体数据库和仿真模拟软件,以苹果采摘环境为背景,对机器人的动作进行了仿真。期刊发表模拟结果表明:机器人的采摘误差较小,可以满足高精度采摘机器人的设计需求。