官方微信
官方微信

 官方QQ
官方QQ


针对期刊发表概括中提出的视觉算法角度进行草坪修整机的研究,在此基础上建造一种以视觉算法为载体,能够将信息数据进行判定以及传输指令的发出,并将其中的应对措施进行PLC反馈,形成自动化运行机制结构系统。该机制结构系统主要分为结构系统与控制系统。在装置的结构系统中,主要构件由主圆盘刀片、副圆盘刀片以及运行构件构成。结构系统主要作用是进行草坪修整机的全面优化,在控制系统中的运行驱动构件进行装置启动,并以此来改变运行速率。除此之外,该运行驱动构件为PLC程序设计,对不同情况的视觉检测结果有着不同信息的反应,将反应结果传输到信息中心,实现对草坪修整机的自动化管理。
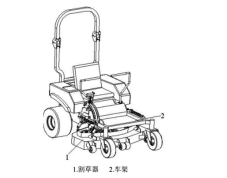
本文以型号为KAZZ536HH草坪修整机为研究对象,其结构示意图如图1所示。
一、期刊发表结构系统设计
结构系统设计主要包括主圆盘刀片、副圆盘刀片以及运行构件组成,在主圆盘刀片中一共设置三个圆盘刀片,刀片之间的间隔距离为390mm,横向切割的长度在1.2m左右,上述主圆盘与刀片被相互固定,在装置启动时通过驱动皮带进行带动运转。为了进行视觉算法角度的草坪修整机期刊发表研究,必须对原有KAZZ536HH草坪修整机进行改造,改造示意图如图2所示,在主圆盘刀片上增加刀盘、强化钢、推杆、曲线槽以及挂钩。
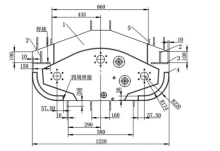
副圆盘刀片在运行时首先由轴柱上的深沟球进行刀片固定,承压轮轴负责对整体圆盘刀片进行支撑,再使用副圆盘刀片上的自动化推杆进行旋转,从而引起曲线槽运转,实现自动化修整机的运行。在上述的推杆中,最大承受压力指数在1000N以下,该标准能够满足日常运作需求,并且通过推杆的启动与停止实现对修整机的控制。最后,期刊发表在最终测试时,还要将该运作轴轮使用皮带紧紧联系,提高稳定性,并且将副圆盘刀片的两端进行磁性阀门的设置,防止装置运转速率过快。
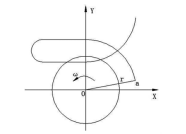
在进行结构系统的运行机制分析中,首先要明确KAZZ536HH的圆盘刀片分为主要刀片以及次要刀片,而主圆盘刀片的长度为16英寸,副圆盘刀片的长度为13英寸,二者具备统一的结构设计,因此在进行草坪修整的过程中,该圆盘刀片迅速旋转,将所要修整的草坪进行处理。得出该修整运动是修整机运转速率与圆盘刀片的共同运转速率合成,即该圆盘刀片上的任意一点都是该草坪修整机的运行轨迹,呈现余摆线,如图3所示,用运行轨迹的公式可以表示为:

在式(1)中r为进行切割的刀片半径(m);t为草坪修整机运转的时间(min);ω为圆盘刀片进行旋转的速率(rad/s);V则是该草坪修整机的运行速率(m/s)。
二、期刊发表控制系统设计
控制系统的设计是实现自动化草坪修整机运行的核心期刊发表,根据其运行流程主要可分为视觉算法实施以及运行驱动开展,在运行驱动环节中以PLC程序控制与信息传输接口为主要难点,并且完成后的运行驱动环节标准为以下四点:一是通过控制副圆盘刀片实现对阀门的人工闭合;二是通过按钮实现对圆盘刀片的闭合;三是当草坪修整机出现意外事故时启动预警机制,实现自我闭合;四是在个系统构件中安装保护装置。其运行环节如图4所示。

根据图4可知,PC机能够与PLC控制系统之间产生信息数据的传输,而PLC系统则可以借助预警系统对圆盘刀片进行控制,是控制系统中最为重要的核心程序,其运行原理首先是将内设相机所收集的信息进行处理,通过在PLC程序中的样本检测设定,成功运算出目标物与草坪修整机之间的距离以及目标物基本信息等,然后将所运算出的距离进行期刊发表分类,一种是高于最高标准,一种是低于最低标准,最后一种是处于标准之内。针对不同情况,由PLC控制系统作出最终判断,将判断结构输入自动化推杆之中,实现对草坪修整机的视觉算法控制。